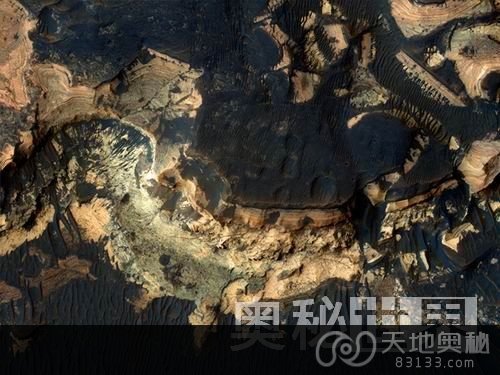
��ѧ�Ҽƻ��÷�Ⱥ�������ڻ���Ѱ��������ͼ��
��ǰ����ѧ����Ϊ�������۷�һ���������ͻ�����Ⱥ�ǶԻ��Ƕ�Ѩ���п������Ѳ��ԣ��������ܹ����ֻ��Ƕ�Ѩ������������
���Ǵ����������ٷ�����ʾδ�����ֵĻ�Ծ��——DZ���ڻ��DZ���֮�µĵ���ѧ��������ѧ����Ӣ���ϰ��նش�ѧ����ʦ����-��˹��(Aron Kisdi)˵��“���DZ���֮�´��������ѧ�Ҹ���Ȥ���������ֻ��Ҫ�ҵ�����”
�����������ǶԽ��ڷ��ֵļ��������¶�Ѩ����ѿ��ⷽʽ����ʵ�������Ѱ��Χ����С������ʱ�䡣2007�꣬�������“�µ���”̽�����ڻ��DZ��淢��7���ϴ�Ķ�Ѩ���������ϴ����ʹ̽����������п��⡣ͬʱ���µ���̽�����ķֱ��ʲ��ʺ��ڶ�Ѩ���⣬�������ڽ�С�Ķ�Ѩ��
��˹��˵��“������Dz�������ڻ��ǽ��п������ж��꣬�����ǽ��ܹ۲С���ֻ�������”�������ַ�Ⱥʽ�������������ԣ����ƻ�ʹ��һ�ֹ�������Ծʽ������——“Jollbot”�����ǵ�½�����ͷ�40-60��С�ͻ���������������ڻ��DZ�����Ѱ��Ѩ���䷽�����۷�Ѱ�ҷ䳲ʮ�����ơ�
��С�ͻ�����ͨ�������²�ֶ�Ѩʱ�����Խݾ�·�߷��ص�½���������ϴ���Ѩ��������¶ȡ�֮�������������Ⱥ�����˷�������½������Ϣ���ϣ��Ӷ�ȷ���Ƿ�ʼ�µ�̽�������߿���������������̽�����Ķ�Ѩ��������������ֳ������Ҫ��Ϣ�����ϴ�����½������ʼ��Ϣ������
�������η������о���Ա�����һ�������Ҫô��Dz�㹻�����Ļ�����Ѱ�ҽϺõĿ���ص㣬���������Ϣ�ϴ�������������ģ�Ҫô���ǶԼȶ��ص�ֱ�����뿱�⡣��˹�ϳƣ����ּIJ��Կ�ʹ��Ⱥ������ʹ����Ҫ���������ƶ������������г���ͬʱ���ֻ���������ɱ������������ʧ��һ�������ˣ���������Ѱ����ȴ��δ��ֹ��
������������ƽ�ʵ���һ��Ǽƻ���ѧ����Ա����-����(David Beaty)˵��“�����˿�����DZ���dz����ֵ������Ϊ�������ṩ���������DZ���������½�������ƣ���һ����Ѩ��������һ����Ѩ��������ٹ��”
���ٲ��������ǰ����������������κη�Ⱥ��������Ѱ��Ŀ������ָ�������˹����Ѱ�ƻ��еĻ����˿ɳ�����ʱ�����У�������ƶ�����ô����ƻ�����п����ԡ��ڻ�˹�ϵ�����ģ���У�50����Ⱥ��������5���ڿɸ�������300ƽ����Χ����������Χ��ͨ�����Ӹ���Ļ����˺�������Ѱ����õ���չ��
��˹��˵��“�Ҽƻ���һ�����������˵�Ӳ��ϵͳ���ҽ����������һ������ԣ�ֱ��ʵ�ֻ���̽����”
��һƪ����һƪ����˵������������С�� ������������
��һƪ����һƪ������56��ä�˻�С�۴ӹŰ�ǰ������








- �����������
- ǿ������
- ɫϵ����
- а����������˿ѧ
- �����
- ����Ԫа������
- ����
- 18���������
- ��Ůа������
- ��Ӱͬ������
- �ձ�ȫ������
- ��ͼ����
- �ؿ�ζ
- ����ͼ��
- ������
- ������
- ������
- ���
- �����
- ��ɫ����
- ɫ�鶯��
- ���������
- ��ʦ����Ӿ
- а������֮�糵�պ�
- а������֮��ͥ��ʦ
- а������֮��ʦ��ζ��
- а������֮������
- ������̬ͼ
- ��Ц��̬ͼƬ
- ���С����а��̬ͼ
- ߣ��ר��
- ��Ů��̬ͼƬ
- а��������̬ͼ
- ����ʦ��������̬ͼ
- ����ʽ
- ��
- ��
- ����
- ��Ȥ��
- Ц��¥
- �ְ���
- 27��а��̬ͼ
- û�ں�
- �
- ���
- 18����
- ������̬ͼ
- Сè��̬ͼ
- è�䶯̬ͼ
- �����˶�̬ͼ
- ����ͼ
- �����˶�̬ͼ
- �����ܻ�
- ����
- ��!��ʾͼ
- ����������ȫ����ɫ
- ��������
- ߣ��ߵĶ�̬ͼ
- �ܻƺ�ɫ
- ����ɺܻƶ�̬ͼ
- �����
- ����žžž
- ��Ů��һ�ΰ�
- ����gifͼ
- ����ͼ
- ������������
- ����������
- �ȷֿ�����
- ŷ������
- ��ɻ�ר��
- �Ȼ�����Ů
- ������Ů��̬ͼ
- а������֮Ů�����
- ��֪���������С�к�
- ��ҹ�ٱƱ�
- а���ں�ͼ
- ��Ҳ��
- žžž
- ����Ц
- ǿ����Ů��̬ͼ
- �еĺ�Ů��žžž
- ���ݺ���
- ���ݶ�̬ͼ
- ɬɬ��̬ͼ
- xxoo��̬ͼ
- h��̬ͼ
- ��һ���ͼƬ
- Ů����а��̬ͼ
- 36d���̶�̬ͼ
- ������̬ͼ
- �ҽ�С����
- �㶮��gif
- ˦�̶�̬ͼ
- ɫ��̬ͼ
- ����Ұ�����ں�ͼ
- ����ʦ����
- �ٱ�
- ����
- ��̬ͼ����
- �����Ӷ�̬ͼ
- ����
- ��ʽ��
- ��̬ͼƬ��
- žžͼ
- žž��Ƶ
- �ڽ���̬ͼ
- �Խ���ʼ
- ����
- ���v
- ����
- 36d��̬ͼ
- ������
- av
- ����
- ��ɫ��̬ͼ
- լ�и���
- ����ͼƬ
- qq�����
- ����ʽ��̬ͼ







-
1
�����û�з��֣��й�����ѧ����1974�괺�����Ѿ���������ʼ���꣬������ʼ�ʵ�����֮��Ҳ�Ѿ��ҵ������Ǽ�������40���ȥ�ˣ�����ȴ����û��Ҫ������˼��һֱ����Ĺ��̽�ˮ���������س������������� ����˵����ǧ��ǰ��Ĺ�ᴦ���������ֽ���˷���Ŀ�...��ϸ>>
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11











